
|
|
|
|
Главная Переработка нефти и газа менительно к штанговым колоннам используются формулы И. А. Одинга, М. П. Марковца и Б. Б. Крумана: Опр СГа + 0,2атах; Опр = Ощах-0,56an,in- . (9.52) (9.53) (9.54) Возможность применения формулы (9.52) показал А. С. Вирновский, (9.53) - В. П. Грабович, а формулу (9.54) получил Б. Б. Круман на основе модифицированной диаграммы Гуд-мена. Конструкции колонн, рассчитанные по данным формулам, различаются незначительно (не более 5-10%), поэтому можно пользоваться более простыми формулами (9.53) или (9.54). Для обеспечения усталостной прочности приведенные напряжения сопоставляются с предельно допускаемыми приведенными напряжениями [опр] для выбранного материала штанг при заданных условиях эксплуатации: Опр<[апр]. (9.55) Предельно допускаемые приведенные напряжения [опр] по предложению И. Л. Фаермана определяют путем статистической обработки фактических данных об обрывности штанг в условиях данного нефтепромыслового района, т. е. с учетом влияния окружающей колонну штанг среды (коррозионная усталость металла). Для этого строится график зависимости средней частоты обрывов штанг от напряжения в верхнем сечении колонн. В качестве [опр] принимаются такие напряжения, при которых число обрывов не превышает 1-3 в год. В литературе имеются таблицы [опр] в зависимости от марки стали, вида термообработки, диаметра насоса и коррозионности продукции. Обычно [апр]=70-130 МПа. Для уменьшения веса колонны ее делают двух- (из штанг двух разных диаметров) или (в случае больших глубин) трехступенчатой из условия равнопрочности ступеней. Условие заключается в том, что приведенные напряжения в наиболее нагруженных (верхних) сечениях каждой из ступеней равны между собой: Onp(l) - Опр(2) = Опр(8). (9.56) Практически при конструировании штанговых колонн применяют таблицы (АзНИИ ДН и др.) или номограммы (А. И. Грузинов), а также аналитические методики. По таблицам в зависимости от режимных параметров (S, п) и диаметра насоса для задаваемой марки стали и [опр] выбирают конструкцию колонны (одно-, двух- или трехступенчатую), диаметры штанг и длины ступеней. 314 Уравновешивание станков-качалок Неравномерная нагрузка, действующая на головку балансира, вызывает неравномерную работу электродвигателя. В простейшей постановке при статическом режиме, когда динамическими нагрузками и силами трения можно пренебречь, эта работа положительна при ходе штанг вверх (направление действующей нагрузки противоположно движению штанг) Л = (Ршт-Рж)5 (9.57) и отрицательна при ходе вниз (нагрузка действует в направлении движения штанг) Лн=-Ршт5, (9.58) т. е. двигатель приводится в действие силой тяжести колонны штанг. Такая неравномерность обусловливает ускоренный износ узлов станка-качалки, ненормальный режим работы электродвигателя. Оптимальный режим его работы будет обеспечен в том случае, если работа, совершаемая двигателем в течение одного двойного хода (при ходе штанг вверх и вниз) постоянна. Постоянство работы достигается уравновешиванием СК грузами (см. § 9.1). Величину и местоположение груза можно установить из условия равенства работ при ходе штанг вверх и вниз. На практике для уравновешивания СК используются номограммы, имеющиеся в паспортной характеристике СК. Окончательное уравновешивание и контроль его осуществляют путем контролирования тока, потребляемого электродвигателем. Ток должен быть одинаковым при ходе вверх и вниз. Проверку осуществляют с помощью переносного амперметра, называемого ампер-клещами, работающими по принципу трансформатора. Для расчета расстояния перемещения груза используется эмпирическая формула А. М. Рабиновича. § 9.4. ОСОБЕННОСТИ ИССЛЕДОВАНИЯ НАСОСНЫХ СКВАЖИН И ДИНАМОМЕТРИРОВАНИЕ ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК Работу скважины, оборудованной ШСНУ, контролируют путем исследования ее и дииамометрирования. Динамометрирование установок Диаграмму нагрузки на устьевой шток в зависимости от его хода называют динамограммой, а ее снятие - динамометриро-ванием ШСНУ. Оно осуществляется с помощью динамографа. В зависимости от принципа работы различают механические, 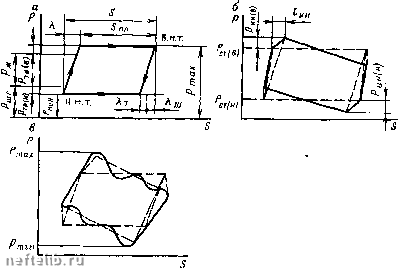 Рис. 9.4. Дннамограммы работы штангового насоса с учетом статических нагрузок н сил трения (а), инерционных (б) и динамических (в) нагрузок: в. м. т. и н. м. т. - соответственно верхняя и нижняя мертвые точки (стрелками показан ход записи дина-мограмыц) гидравлические, электрические, электромагнитные, тензометри-ческие и другие динамографы. В наиболее распространенном гидравлическом динамографе конструкции Г. М. Мининзона типа ГДМ-3 действующая на шток нагрузка передается через рычажную систему на мембрану камеры, заполненной жидкостью (спиртом или водой), где создается повышенное давление. Давление жидкости в камере, пропорциональное нагрузке на шток, передается по капиллярной трубке на геликсную лру-жину. При увеличении давления геликсная пружина разворачивается, а перо, прикрепленное к ее свободному концу, чертит линию на бумажном диаграммном бланке. Бланк закреплен на подвижном столике, который с помощью приводного механизма перемещается пропорционально ходу устьевого штока. В результате получается развертка нагрузки Р в зависимости от длины хода S. Для снятия дннамограммы измерительную часть динамографа (месдозу и рычаг) вставля1бт между траверсами канатной подвески штанг, а нить приводного механизма самописца прикрепляют к неподвижной точке (устьевому сальнику). Масштаб хода изменяют сменой диаметра шкива самописца (1:15, 1:30, 1:45), а усилия -перестановкой опоры месдозы и рычага (40, 80 и 100 кН). Изучение дннамограммы позволяет определить максимальную и минимальную нагрузки, длины хода штока и плунжера, уяснить динамические процессы в колонне штанг, выявить ряд дефектов и неполадок в работе ШСНУ и насоса. На рис. 9.4, а показана простейшая динамограмма нормальной работы насоса, которая имеет форму правильного параллелограмма (обо-  "7 L------ Рис. 9.5. Практические дннамограммы работы штангового насоса: а -нормальная тихоходная работа; б -влияние газа; в - превышение подачи насоса над притоком в скважину; з - низкая посадка плунжера; д - выход плунжера из цилиндра невставиого насоса; е -удары плунжера о верхнюю ограничительную гайку вставного насоса; эк - утечки в нагнетаемой части; з - утечки во всасывающей части- и - полный выход из строя нагнетательной части; к - полный выход из строя всасываюпгей части; л - полуфонтанный характер работы насоса; м - обрыв штанг (пунктиром показаны линии теоретической дннамограммы) значения приводятся в § 9.3). Силы трения направлены против движения, поэтому при ходе вверх они увеличивают нагрузку, а при ходе вниз - уменьшают. Инерционные нагрузки вызывают «инерционный поворот» дннамограммы относительно нормального ее положения (см. рис. 9.4,6). Волнистый характер линий обусловлен колебательными процессами в штангах (см. рис. 9.4,в). Практические дннамограммы по виду всегда отличаются от теоретической, сопоставление с которой позволяет выявить дефекты и неполадки в,работе установки и насоса (рис. 9.5). Такая расшифровка динамограмм возможна при небольших глубинах, малых динамических нагрузках -и малых диаметрах насоса. При значительных динамических нагрузках динамограмма, полученная с помощью ГДМ-3, существенно искажается, что затрудняет надежный контроль за работой насо-. сов. В таких условиях представляет интерес получение глубинных динамограмм, соответствующих нижнему концу штанговой колонны, или пересчет динамограмм, полученных наземным динамографом, в глубинные (метод разработан А. С. Вирнов-ским). Для снятия дннамограммы с помощью ГДМ-3 требуется остановка станка-качалки. На автоматизированных промыслах осуществлен переход на снятие динамограмм дистанционно из диспетчерского пункта с использованием стационарно установленных тензометрических датчиков усилий и датчиков линейных и углОвых перемещений. Для телемеханизации применяют систему телемеханики ТМ-620, которая обеспечивает телеуправление двухпозицион-нымн исполнительными устройствами ТУ, телеизмерение интегральных (дебит) ТИИ и текущих (давление и др.) ТИТ значений параметров, телединамометрирование (телеконтроль) ТД, телесигнализацию аварийного состояния ТСА, телесигнализацию состояния двухпозиционного объекта ТСС, а также двухстороннюю телефонную связь. Совместно с системой ТМ-620 работает устройство телединамометрирования частотное УТЧ. Система типа ТМ-660Р «Хазар» в качестве линии связи имеет также выделенный радиоканал. Разрабатываются объектно ориентированные микропроцессорные комплексы, позволяющие дистанционно управлять кустами (группой) скважин с механизированной (газлифтной, насосной) добычей нефти. Исследование скважии, оборудованных штанговыми насосными установками Скважины, оборудованные ШСНУ, исследуют в основном при установившихся режимах с целью получения индикаторной линии Q(iAp) и зависимости Q от режимных параметров работы установки. Согласно уравнению (9.2) дебит задают величинами Sun, изменяя одну из них при переходе к другому режиму отбора жидкости. Исследование скважин, оборудованных ШСНУ, осложняется тем, что спуск глубинных приборов в насосные трубы исключен, так как этому мешает колонна штанг. Отсюда особенность исследования в данном случае по сравнению с другими способами эксплуатации скважин связана с определением забойного давления рз. Его можно определить прямым или косвенным путем. Косвеннце методы приводят к большим ошибкам и могут быть применены только для ограниченного числа скважин, в частности сильно обводненных. Необходимую точность результатов можно получить только лишь непосредственным измерением параметров в скважине. Существуют два способа спуска приборов в такие скважины: на колонне НКТ и на проволоке или кабеле. При прямом измерении рз по первому способу лифтовые скважинные манометры подвешивали к приемному патрубку ШСН и спускали в скважину вместе с НКТ. Часовой механизм с многосуточным заводом обеспечивал возможность местной регистрации давления в процессе исследования. Однако необходимость проведения спускоподъемных операций НКТ ограничила применение лифтовых манометров. При прямом измерении рз по второму способу в затрубное пространство на стальной проволоке диаметром 2-2,2 мм через патрубок устьевого оборудования (при эксцентричной подвеске НКТ) спускают малогабаритный скважин-318 Ный манометр Диаметром 22-25 мм (способ разработан в Баш-НИПИнефти). Одно из главных преимуществ способа - оперативность. Однако в глубоких и искривленных скважинах возможны прихваты и обрывы проволоки. Известен, также способ, когда приборы спускают на кабеле, а затем уже спускают колонну труб с насосом. Прямые измерения рз обеспечивают получение надежных результатов исследования. Поэтому представляет интерес применение датчиков давления, постоянно находящихся в скважине. Косвенным путем определить рз можно по формуле гидростатического давления: p3 = hyKg, (9.59) где Яд - динамический уровень жидкости; рж - средняя плотность жидкости в скважине (в затрубном пространстве и ниже приема насоса), которую обычно принимают равной плотности дегазированной нефти с учетом обводнения вследствие затруднений при ее определении. Определение глубины Яд от устья скважины до динамического уровня жидкости осуществляют с помощью эхолота. Тогда Яд=Я - Яд. Сущность эхометрии заключается в следующем. В затрубное пространство с помощью датчика импульса звуковой волны (пороховой хлопушки) посылается звуковой импульс. Звуковая вОлна, пройдя по стволу скважины, отражается от уровня жидкости, возвращается к устью скважины и улавливается кварцевым чувствительным микрофоном. Микрофон соединен через усилитель с регистрирующим устройством, которое записывает все сигналы (исходный и отраженные) на бумажной ленте в виде диаграммы. Лента перемещается с помощью лентопротяжного механизма с постоянной скоростью Ул. Измеряя длину записи /ур между импульсами сигналов на эхограмме, определяем время прохождения звукового сигнала от устья до уровня и обратно /ур=/ур/Ул. Тогда вычисляем расстояние от устья до где Узв - скорость звука t t ур динамического уровня Яд=Узв-- в газовой среде затрубного пространства. Однако метод эхолотирования имеет ряд недостатков. Ско-)0сть Узв зависит от давления, температуры и плотности газа. Логрешность в ее определении снижает точность результатов исследования. Погрешность результатов уменьшается, если их находить по изменениям динамического уровня. Для ее определения на колонне НКТ вблизи уровня на заданной глубине Lpen предварительно при очередном ремонте устанавливают репер-отражатель. В качестве репера служит утолщенная муфта или отрезок трубы, который на 50-65 % перекрывает затрубное пространство. На эхограмме получаем сигнал, отлаженный от репера. Тогда определяем аналогично время прохождения волны 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [ 52 ] 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 |
||
 |
 |
