
|
|
|
|
Главная Переработка нефти и газа l,=1 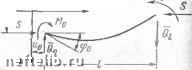 Рис. 61. Схема конечного элемента Рис. 62. Расчетная схема элемента надземного участка трубопровода надземного участка трубопровода трубопровода на расстоянии х от начала коордниат; S - продольное усилие, положительное при сжатии; 4? - интенсивность поперечной нагрузки. Решение этого уравнения запишем в форме начальных параметров. Положительные направления начальных параметров приведены на рис. 62. Уравнения прогиба, угла поворота сечения, нзгибаюшего момента и поперечной силы при S>0 имеют внд: I sin kx EI кЧ (1 - cosftA;)-Qo---(W -sinftx)+ \---(--1 + cos йа: I; EIkH V 2 ) ф(х) = фоС08*Х- Лс I EI kl sin kx EI кЧ (1 - С08АДГ) + {kx - sin kx); Eim M(x) - Фо sin fex 4- Affl cos fex: + Qo - / kl Q(x) = Qo-qx, sin kx + ;i - cos kx); (12.3) где tin, фо. Mo, Qo - соответственно нсремещеине, угол поворота, изгибающий момент и поперечная сила; / длииа элемента; k=SjEI - параметр продольного усилия. Для удобства вычисления матрицы жесткости под поперечной силой Q понимается сила, направление которой перпендикулярно к недеформировап ной оси элемента (см. рнс. 62). При действии растягивающего усилия (S<0) соответствующие уравнения можно получить (12.3), заменив к на и используя известные зависимости для функций комплексных псре.мешгых. Используя приведенные решения и уравнение продольного сжатия, находим искомые элементы матрицы жесткости и грузовых членов: 022 = 22 - 12£/ 033=33 = EFil, «31 = «32 = «13 = «23 = bsi = *34 = Кз = 23 = 0; qP 12 = b2P = 4; (12.4) Os P = fcs p = «Д tEF + pFcB- рОкцР. (12.5) где F - площадь сечения стенок трубы; At - температурный перепад, положительный при иагреваиии; р -внутреннее давление; fee - площадь сечения трубы в свету; Окц - кольцевые напряжения от внутреппего давления. Приведем формулы для определения v в функции безразмерного параметра продольного усилия т=\5\Р/пЕ1: для S>0 ignm-лт п т. Vo = 2 2 nm - sinnm 4 sin л т д т. для S<0 V, = V4 = Vi = th дт пт 2 ~2~ пт - sh 4 sh пт 3/tb 3f th nm для S = 0 Vi - V5=l. Таким образом, получены матрицы жесткости и реакций для элементе открытой (надземной) части трубопровода. Здесь индекс элемента i опущен, эти выраженпя используются для любого элемента с приспоенисм соответ ствующего ин;1екса (. Так как рассматривается надземный переход с при.мыкающими полу бесконечными подземиы.ми участками, то необходимо записать также мат рицу жесткости и вектор грузовых члсиов для начала полубесконечного уча стка. В качестве расчетной модели грунта принимается упругое основапш т. е. считается, что ио длине имеются распределенные поперечные и продоль ные связи, сопротивление которых пропорционально соответствующим пере мещеиням, т. е. Гх=-Схпи, qy=-CyoV. Уравнения продольно-поперечного изгиба и продольных перемещений дл такой расчетной схемы (рис. 63) имеют вид: Л- пи = О, (12. (12.7) (12.8)i и -продольное перемещение трубопровода па расстоянии х от начала коор- динат; Су о обобщенный коэффициент норлтальпого сопротивления грунта! Dts наружный диаметр трубы. Сю - обобщенный коэффициент ка-сательпого сопротивления грунта. На основании решепин уравнений (12.6) и (12.7) через начальные параметры (см. гл. 4 и 6) находим искомые элементы матрицы же- сткостн и грузовых членов дли начала иолубесконечного элемента:  Рис. 63. Схема полубесконечиого подземного участка трубопровода, примыкающего к переходу Ol3 = «23 = «31 = «s2 == 0;  -y/cyoDaE] SL-2CyoDEI-S; asp = сШЕ + pfCB рокц • (12.9) Этн элементы матрицы используются для оиисаиия только примыкающих к надземнсму переходу с обеих сторон подземных участков трубопровода. § 3. Уравнения равновесия узла Как отмечалось раисс, вся рассчитываемая система заменяется конечными линейными элементами, соединенными в узлах. В нашем случае в каждом узле соединяются два элемента. Крве того, для общности решения буде.м считать, что в каждом узле имеются три упруго-иодатлнвые опоры - угловая и две линейные, иаиравленные поперек и вдоль элемента. Типовой узел рассчитываемой системы изображен па рис. 64. Особыми свойствами будут обладать только крайние узлы, где имеются полубескоиечные элементы. Направление счета узлов и элементов принимаем слева направо. Обозначим номер уз.1а через t, длину элемента, предшествующего узлу, через L, последующего U+i, угол между эле.меитом и вертикальной осью, иапраплсн-ной вниз, через у с соответствующим индексом, перемещение узлов обозначим через Z с соответствующим индексом, причем для узла i перемещения 2з i-2, Zs i-i и Zs 1 означают соответственно угловое, поперечное и продольное (осевое) перемещения в местной системе координат. Положительные иа- 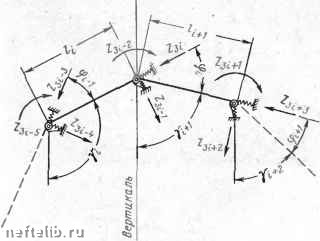 правления углов -у и псремещепий z приведены на рис 64. Угол между эле-мента.«и отредйчястся по формуле (12-10, причем утол tpi будет положительным, если вращение продолжения предыдущего элемента до совмещения с последующим будет происходить по часовой стрелке. Учитывая особенности крайних узлов, обозначим их номера соответственно индексам и и к. Уравнения равновесия узла выражают условие равенства пулю суммы моментов и проекций всех сил на ортогональные оси от всех нагрузок н1 воздействий. Тогда для каждого ззла в плоской системе иолучаеы три урав-i нения, которые в матричной форме имеют вид где векторы перемещений и /рузовых реакций (12.11
(12.1 Матрица жесткости узла вычисляется иа основании матрицы жесткости элементов, примыкающих к узлу, и матрицы жесткости связей с приведепиек ее к принятой (см. рис. 64) системе узловых перемещений: /(/-1-1) "?к№) (12.1 где П; -матрица поворота; Пл-транспонированная матрица; Ci -матриц жесткости связей;
(12.1 Аналогичным образом вычисляется матрица грузовых членов rji = - Ki - пДн,-. (12.15) Уравнение (12.11) составляется для всех узлов системы путем присвоения индексу i всех значений номеров узлов. Отметим также, что при /=н нли /=к матрицы жесгкосги соответствующих .э.чемеитов берутся для подземной части. Кроме того, необходимо учесть, что если индекс нри перемещениях Z .мепьще Зн -2 или больше Зк, то соответствующие неремещения Z = 0, так как крайнне элементы приняты полубескоисчиыми. § 4. Компоненты напряженно-деформированного состояния трубопровода Из решения системы линейных уравненнй (12.11), число которых равно строенному произве.чению числа узлов, определяют неизвестные перемеше-пия Z во всех узлах. Далее, зная перемешення обоих концов элемента, можно определить граничные параметры. Под граничными параметрами здесь понимаются Три компонента перемсшепий - поперечные, продольные перемещения и угол поворота - и три компонента усилий - поперечная, продольная силы и изгибающий момент. Для вычисления компонентов усилий исполь-:п-ются эле.менты матрипы жесткости и матрицы грузовых членов. Расчетные зависимости для вычисления граиичпыс параметров имеют вид: . . Wo = Z3,- 4 cos Ф, 1-Ь 2з£ з sin ф,-; ЛТо = 019 + Zsi-sOii - (2.-»-4 COS Фг 1 -I- zsis sin (fi-x) a,j + Zaf-ofcu+si-ifcia; qo = om + zsi ra.,i - (zsii cos Ф,- 1 zi.sin Vf i) a« ~ zi-i + z.iib.; (12.16) vizgi; Ф/ = zsi2, t ml -big - zsi mn - at-ifliz + (zai-icos(f, i-f + Zgt-a sin фх) fcjj -- zstibii; qi b,q - zsian - zcqoz - (Z3.- 4 cos (p, i 4- 2з1-з sin ф-!) bi, -\- zsi-a . (12.17) Обычно для онределепня распределсиня перемещений и усилий по длине стержня считается удобным использовать метод начальных параметров. Однако как показал нроведепиый матипный эксперимент, испо.чьзованис этого метода приводит к численным ошибкам. Поэтому нам при числеппых методах peniennn пришлось отказаться от этого общепринятого метода и использовать уравнения в граничных параметрах: viv\\- Ф, (I)] 4- f/®7 (I) + Фо [Ф1 (I) - Фт (Е) Ф1 (Ю - Фв (I) Ф* (1)] + + Ф;Ф8() + [Ф4 (I) - Ф4 (1) Фт (S) - Фв (5) Фз (1)]; «РЕ - (tv - щ) Фа (1> 1- Фо 1Ф5 т ~ Фю (Ю Фб (1) - Ф. (I) Ф1 (1)] -Ь ФгФи* <е) + 4--V -Л" © -®»(i) ()1: щ = мо [ф, (1) - ФЛ1) Фц т) + мгфп (i) + qo 1Ф1 (£) - Фд (1) Фл (1)1 - -<71Ф2(Ю-Ф2(1)Ф11 (1)1-. Q-Qo(l-fe) + QHS- (12-18) В этнх уравнениях g=-/,/Z - безразмерная текущая координата, изменяющаяся от О до 1, а Ф -функция от g. Значения введенных допачните.пьпых функций Ф(\) вычисляются по приведенным формулам, приче.\1 зиачения функций и:5меняются в зависимости от знака продольного усилия: для S > О ф (I) =-sin nmg; 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [ 39 ] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
