
|
|
|
|
Главная Переработка нефти и газа рованию растет давление масла в рабочем цилиндре. При этом усиливается просачивание жидкости через зазор между цилиндром и поршнему и скорость деформирования уменьшается. Для ее поддержания на постоянном уровне необходим дополнительный регулятор, увеличивающий подачу жидкости в цилиндр пропорционально ее утечке. Непостоянство скорости деформирования существенно, 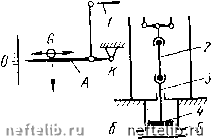 Рис. 79. Схемы нс[1ыта1ел1.!1ых машин с механическим {а) и гнлравличек:кнм (б) приводами KovAZ механические свойства испытываемого материала заметно зависят от нее, например при поъъ\шт\\ых температурах. Для измерения силы сонротнБ.гення образм дерориа-ции используют несколько типов устройств. Наиболее распространенными из них являются рычажные, маятниковые, торсионные, электротензометрнческие силоизмерите-ли, месдозы. Принцип действии рычажного силопзмсрителя / ясен из рнс. 79. Когда образец перемещается вниз вместе с подвижным захватом, то верлний захват, следуя за образцом, также смещается вниз и стремится поднять кверху рычаг Л, на котором имеется подвижный груз G. 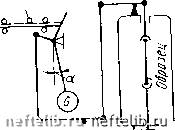 1±1 Рис. 80. Схема гидравлической машины с маятниковым силоизмери-телем но 1 vt ......---- Передвигая этот груз влево, можно сохранить горизонтальное расположение рычага Л, уравновесив таким образом поданное на образец усилие. При этом величина смещения груза G относительно оси поворота рычага (точка К) будет пропорциональна силе сопротивления образца yyj). деформации. Остается определить у77у Маш коэффициент пропорциональности, что легко сделать по результатам тарировки, подавая на образец Известные нагрузки. Еще большее распространение получил маятниковый силоизмеритель (рис. 80), отличающийся высокой иа- Дежностью. Здесь усилие йа образец уравновешивается тяжелым маятником G, связанным через систему рычагов с верхним захватом машины. Когда образец растягивается и верхний захват смещается вниз, маятник отклоняется на какой-то угол а от своего равновесного вертикального положения до тех пор, пока не уравновесит действующее на образец усилие. Л\аятник связан со стрелкой измерительного прибора, шкала которого проградуирована в единицах силы. Рычажные и маятниковые силоизмернтели успешно применяют прн малых скоростях деформирования (20-40 мм/мин) и плавном из- Рис. 81. РезисторныЙ тен-водатчик (а) и схема измерения статических напряжений с помош;ью таких тензодатчнков (б): /- бумажная подкладка; 2 - плоская решетка из проволоки или фольги; 3- ныводные провода 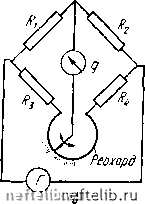 менении силы сопротивления образца деформации. В иных условиях из-за большой инерционности этих типов снлоизмерителей измерение усилий выполняется со значительными ошибками. Например, при реаком увеличении усилия в образце маятник по инерции поднимается выше положения равновесия, а затем возвращается обратно. Возникают колебания маятника, которые хотя и затухают, но могут серьезно нарушить точность оценки силы сопротивления образца деформации. Значительно меньшей инерционностью отличаются месдозы и торсионные силоизмерители, используемые в гидравлических машинах. В месдозе усилие Р на образце измеряется манометром, перемещение стрелки которого пропорционально силе, действующей на жидкость через поршень и эластичную мембрану. В торсионном силоизмерптеле цилиндрический стержень (пружина) одним концом закреплен неподвижно. Ко второму его концу через перпендикулярный рычаг прикладывается усилие, пропорциональное давлению жидкости в рабочем цилиндре машины. В последние годы в испытательных машинах основными стали электротензометрнческие силоизмернтели. Они пригодны для машин с гидравлическим и механическим приводами, отличаются компактностью и высокой точностью измерения усилий. Основными элементами силоизмерителя являются упругий элемент и тензодатчик, например резисторный (рис. 81, а), Резисторный датчик представляет собой тонкую проволоку или фольгу из материала с высоким коэффициентом тензочувствительности - отношением изменения электросопротивления (Л/? ?о) к упругому относительному удлинению. Проволоку укладывают определенным образом иа тонкую бумажиую подкладку. Теизодат* пик наклеивают на упругий элемент (стальной цилиндр), к которому крепится неподвижный захват машины. При растяжении образца в vh-ругом элементе возникают напряжения и соответствующие им упругие деформации, в результате чего пропорционально меняется электросопротивление тснзодатчика. Для регистрации изменения сопротивления теизодатчик включают в схему измерительного моста. На рис. 81,6 показан уравновешенный мост Уитстона, где нлечо R\ - резнстор-ный датчик, Rz - компенсационный датчик с тем же сопротивлением, что н у рабочего R\ до начала испытания. Сопротивления R3 = Ri ;Ri = R2, На одну из диагоналей моста подают ток от источника Г, а в другую включают электронный усилитель. Когда мост сбалансирован, индикатор усилителя g стоит на нуле. При растяжении R\ изменяется и в цепи индикатора появляется ток. Изменяя положение реохорда (см. рис. 81,6), можно вновь восстановить равновесие моста, а показания реохорда проградуировать в единицах силы. Все силоизмерителиые механизмы позволяют не только визуально фиксировать силу сопротивления образца деформации в процессе испытания, но и записывать кривую изменения этойсилы в зависимости от величины деформации (абсолютного удлинения) образца. Кривую в координатах нагрузка - удлинение называют первичной диаграммой растяжения, которая и является обобщенным результатом испытания. Перо самописца, перемещающееся по ленте на диаграммном барабане, связано только с си-лоизмерителем. Возможность фиксирования деформаций на диаграмме растяжения обеспечивается вращением барабана - направление движения ленты оказывается перпендикулярным оси нагрузок. В большинстве используемых машин скорость вращения диаграммного барабана, т. е. масштаб по оси удлинения, прямо связан со скоростью перемещения подвижного захвата машины. Это означает, что удлинение образца принимается равным перемещению подвижного захвата. Но величина удлинения должна определяться только иа расчетной длине образца. Перемещение же захвата соответствует суммарному удлинению, включающему деформацию зажимов машины, а также упругие деформации других ее частей. Величина всех этих «паразитных» деформаций определяет жесткость испытательной машины - очень важную ее характеристику, влияющую на определяемые на ней механические свойства. По ГОСТ 1497-73 жесткость испытательной машины определяется как величина, обратная податливости К, равной перемещению подвижного захвата на единицу приложенной силы Р. Перемещение подвижного захвата Мм включает суммарную упругую деформацию нагруженных частей машины. Таким образом, жесткость машины, МН/м, равна \IK = Pltu. (52) Чем она больше, тем меньше упругая деформация частей машины при заданной нагрузке. Абсолютно жестких машин, когда Д;м=0, а 1/Д=оо, не бывает. Величина \1К в современных испытательных машинах колеблется от десятков до сотен МН/м. Зависит она в основ* ном от упругих деформаций в силоизмерительном механизме, которые вносят основной вклад в Л/м (деформации стаиииы, захватов и других частей машины обычно незначительны). Поэтому максимальную жесткость имеют машины с электротензометрическим силоизмерителсм, а минимальную - с рычажно-маятниковым. Машины с разной жесткостью будут характеризоваться разным наклоном прямых на диаграмме нагрузка - абсолютная упругая деформация машины (рис. 82). Чем сильнее наклонена прямая относительно оси деформаций, тем жестче машина. При одном и том же усилии Pi в более податливой машине возникнет упругая деформация Д(м2, превышающая такую деформацию Л;„1 в более жесткой машине. Соответственно в податливой машине будет накапливаться большая упругая энергия; Лупр= в = PMu2/2>PAL,/2. В случае разгрузки, например при образовании зуба текучести при р разрушении, эта запасенная упругая энергия будет неизбежно выделяться. / Если в результате разгрузки упругая деформация двух сравниваемых машин уменьшится на одинаковую величину ЛГ (см. рис. 82), то нагрузка в жесткой машине снизится сильнее (на APi), чем в податливой (на ДРа), и в последней сохранится большая упругая энергия. Б обоих случаях выделение Лупр приведет к увеличению скорости деформации и действующего на образец усилия, поскольку прн разгрузке неподвижный захват будет быстро-со скоростью упругой деформации-перемещаться на величину М. Степень влияния жесткости машины на результаты испытаний зависит от свойств материала образца. Последний тоже обладает какой-то жесткостью 1 Собр = Р/Д/обр. Для замкнутой системы машина - образец определяют коэффициент податливости q= (1/обр)/(1 С) =Д?м/Д/обр, который тем больше, чем меньше жесткость машины по сравнению с жесткостью образца. Если 1Жобр>1 С, то (7>-1, и запасенная машиной упругая энергия будет при разгрузке передаваться образцу, в результате чего фиксируемое силонзмерителем усилие окажется завышенным. Если образец податливей машины (1 Собр< 1 С и д<.1), то это завышение будет меньше. Следовательно, чем жестче машина, тем точнее будут измеряться усилия прн быстрых изменениях их величин в процессе испытания. При плавном нагружении в областях упругой и равномерной пластической деформации влияние жесткости машины на механические свойства несущественно. Величина «паразитных» деформаций частей машины тем больше, чем выше сопротивление образца растяжению. Полностью избавиться от них невозможно. Поэтому в лучших современных маиншах для регистрации только удлинения расчетной части образца на ней раз.мс-щают специальный датчик - прибор, измеряющий деформацию. В качестве такого датчика можно использовать тот же проволочный тензометр, что и при измерении усилий (см. рнс. 81). Удлинение образца вызовет измерение электросопротивления, и полученный сигнал будет определять перемещение ленты электронного самописца, i. е. масштаб Рис. 82. Схема оценки жесткости испытательной машины - аб- солютная упругая деформация машины) оси абсцисс диаграммы растяжения. Другие типы тензометров для измерения деформаций будут рассмотрены ниже. В стандартах, регламентирующих методы испытаний на растяжение, оговорена необходимость надежного центрирования образца в захватах испытательной машины. Плохая центровка приводит к перекосу направления растяжения относительно оси образца, в результате чего образец изгибается, схема одноосного растяжения нарушается, напряжения распределяются по сечеиию образца неравномерно, и он может преждевременно разрушиться от перекосов вблизи головок. Влияние головок, несмотря на плавные переходы (см. рис. 77), сказывается и на искажении схемы напряженного состояния в некоторой части рабочей длины образца. Именно поэтому свойства прн растяжении оценивают на расчетной длине, границы которой достаточно удалены от головок. Длительное время наиболее широкое распространение имели машины с механическим приводом и маятниковым силоизмернтелем. Они отличаются простотой, компактностью и позволяют записывать диаграммы растяжения в достаточно большом масштабе. Но в последние годы они вытесняются более жесткими и точными машинами с элек-тротензометрическим измерением напряжений и деформаций. На рнс. 83 показаны общий вид (а) и кинематическая схема (б) одной из таких испытательных машин типа УМЭ-10Т. Это сложное и дорогое устройство. Однако и возможности, которые обеспечивает эта машина, несравненно лучше, чем у машин с маятниковым силоизмернтелем. Предельная нагрузка ее 0,1 МП, причем имеется шесть различных диапазонов нагрузки. Жесткость 1 С=45 МН/м. Скорость деформирования может изменяться от 0,005 до 100 мм/мин (всего можно задать десять скоростей). Машина УМЭ-10Т является универсальной: на ней можно, кроме растяжения, проводить испытания на сжатие, изгиб, а также на малоцикловую усталость. В комплект машины входят нагревательные устройства, позволяющие проводить высокотемпературные испытания. Но главное достоинство машины - высокая точность замера усилий и деформаций, обеспечиваемая за счет применения теи-зометрических датчиков. Конструктивно машина УМЭ-10Т состоит из следующих основных узлов (см. рнс. 83, а): собственно машина /, пульт управления с элек тронной и электроприводной аппаратурой 2 и нагревательные устройства, включающие шкаф управления 3, термостат (373-773 К) и печь (773-1273К). Основание 15, колонны 9 и верхняя траверса 10 образуют жесткую раму машины (см. рис. 83,6). В верхней траверсе кренится силоизмерительный датчик (динамометр) 11, представляющий собой полый цилиндр с наклеенными на него тензометрнческимн датчиками сопротивления. Верхний захват (для цилиндрических образцов с головками) выполнен как единое целое с корпусом динамометра. Если используются сменные захваты (например, для плоских образцов), то они крепятся к захватам для цилиндрических ,образцов. Нижний захват 12 центрируется при сборке машины относительно динамометра и крепится к столу 13, который перемещается на направляющих втулках 8 по колоннам при движении грузового винта 16. Грузовой винт соединен сдвухскоростным асинхронным электродвигателем 17 через электромагнитную муфту 7, коробку передач б и разрезную гайку 14. Коробка передач обеспечивает соотношение чисел оборотов выходного вала к входному 1:1; 1 : 10; 1 : 100; I : 1000 и 1 : 10000. Сочетание двухскоростиого двигателя с такой коробкой передач позволяет получить диапазон скоростей деформирования 0,005 100 мм/мин. На рабочей части образца устанавливают тензометр, имеющий базу (длину) 50 мм, на которой производится измерение деформации. При растяжении образца на выходе измерительных мостов тензомет-рических датчиков силоизмерителя и деформации появляются сигналы разбаланса. Они усиливаются, проходят ряд преобразований и поступают на вход реверсивных асинхронных электродвигателей 2 и 5. Двигатель 2 связан через систему передач со стрелкой индикатора нагрузок / и пером самописца 3, а двигатель 5 вращает диаграммный 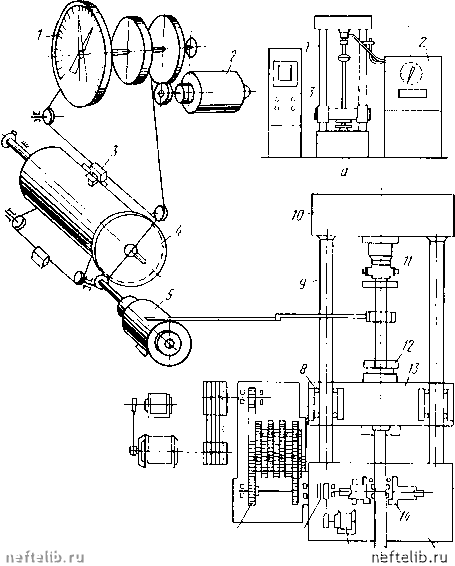 67 Рис. 83. Схема уЕШверсалыюй машины УМЭ-10Т барабан 4. Перо перемещается и записывпст диаграмму растяжения. Допускаемая погрешность при записи диаграмм па машине УМЭ-10Т не превышает 2 % от измеряемой величины. Маси1таб по оси деформации может задаваться от 100 : 1 до 1000 : I. Масштаб по оси нагрузок 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [ 24 ] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |
||
 |
 |
