
|
|
|
|
Главная Переработка нефти и газа Символ (0°) YyO (0°) {О") (150°) (150°) Yz5 (150°) Векторная диаграмма    \5 В Схема соединений  >А >В  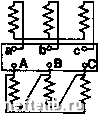
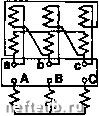 Символ Dd6 (180°) Yy6 (180°) Dz6 (180°) Dyll (330°) Ydll (330°) Yzll (330°) Векторная диаграмма 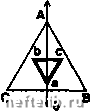 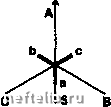  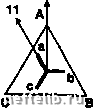 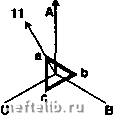 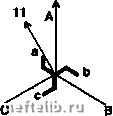 Схема соединений
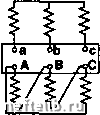 A oB oCl a sb A qB Замечание. - Схемы даны в предположении, что обмотки имеют одно и то же относительное направление обматывания. Символы рекомендуемых соединений даны жирными буквами. Обычнью совдтвния трехфазных систем (источник U.T.E. (), норма NFС 52-220). С) Union technique de r6lectricil6 - Электротехнический союз (прим. перев.). 1.6.4.2.1. Асинхронные двигатели 1.6.4.2.1.1. Асинхроннью двигатели с неподвижными обмотками Они бывают двух основных типов в зависимости от конструкции ротора: - ротор с простым корпусом, - ротор с двойным корпусом или с глубокими пазами. Эти роторы допускают возможность выбора характеристик пары и тока пуска: - роторы с простым корпусом имеют: • относительно слабую пусковую пару (0,5 -0,9 • максимальную пару, достигающую 3,5 • силу тока пуска, меняющуюся от 4,5 до 5,5 !„, (С„- номинальная пара, 1„- номинальный ток); - роторы с двойным корпусом или с глубокими пазами имеют: • относительно высокую пусковую пару, порядка 2С„, • максимальную пару того же порядка, • пусковую силу тока, меняющуюся от 5 до 6,51; Эти двигатели естественно использовать для интенсивной работы и в опасных условиях, поскольку: - простота принципа действия ротора на прямых контактах сообщает им большую механическую мощность, - скорость слабо меняется (примерно на 2%) при нафузке, - обслуживание отличается простотой. Характеристики пары асинхронных двигателей с неподвижными обмотками исключительно хорошо подходят для таких машин, как центробежные насосы, компрессоры, конверторные фуппы, станки и вентиляторы. Тем не менее, всем этим двигателям присуще неудобство, связанное с относительно малым коэффициентом мощности, имеющим порядок 0,8 - 0,9 при полной нафузке и убывающим при работе с малой нафузкой. сое* Ил С/С„ 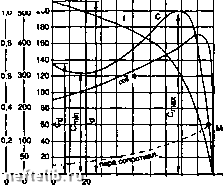 40 60 60 100% Если мощность, заключенная в асинхронных двигателях велика, может оказаться необходимым, в зависимости от случая, реализовать глобальную или частную компенсацию коэффициента мощности. 1.6.4.2.1.2. Асинхронные двигатели с роторной обмоткой Поскольку контакт с роторной обмоткой осуществляется кольцами, сопротивление этого контура может быть изменено введением внешних сопротивлений. Уменьшая внешнее сопротивление во время запуска, получаем смещение характеристики C(C„) и согласование пусковой пары с парой приводимой в движение машины. Заметим, что значение максимальной пары не зависит от роторного сопротивления. С другой стороны, роторный ток при слабых скольжениях обратно пропорционален роторному сопротивлению. Различные возможности применения асинхронных двигателей с роторной обмоткой делают их удобными для приведения в движение машин с большой стартовой парой, таких как вентиляторы большой инерционности, дробильные машины, мешалки, транспортеры и т.д. Кроме того, в машинах, требующих сильного торможения противотоком, также используются двигатели этого типа. Как и для асинхронных двигателей с неподвижной обмоткой, коэффициент мощности в нормальном режиме относительно низок; это свойство, а также наличие колец и роторных сопротивлений, ведут к тенденции исчезновения двигателей рассматриваемого типа в пользу двигателей с двойным корпусом или глубокими пазами. Кривые показывают, что вводя значительное сопротивление в роторный контур, можно получить выгоду при торможении противотоком. Зона устойчивости. Ротор замкнут накоротко 1 0,5 R, R>R R>R   Работав режиме генератора О 0,5 Работав режиме мотора Работа торможения противотоком Характеристики асинхронного двигателя с неподвижными обмотками в зависимости от скорости. Кривая С(д) асинхронного двигателя с роторной обмоткой. 1.6.4.2.2. Синхронные двигатели Эти двигатели принципиально отличаются от асинхронных следующими свойствами: - постоянная скорость, - роторный контур питается постоянным током, - коэффициент мощности может регулироваться током возбуждения. Они технологически идентичны генераторам переменного тока. Чтобы получить асинхронную пару и избежать колебаний, роторы оборудуются амортизацией: это помогает запускать синхронные моторы аналогично асинхронным с простым корпусом, с кото-рыми они имеют близкие характеристики пары и интенсивности. Чтобы избежать слишком высоких напряжений в контуре возбуждения, последний шунтируется при запуске и расцеплении сопротивлением, значение которого выбирается в диапазоне между пяти- и десятикратным сопротивлением контура возбуждения. Поскольку асинхронная пара стремится к нулю при приближении к скорости синхронизма, сцепление в конце запуска таких двигателей от сети не может осуществляться при скорости синхронизма, как для альтернаторов. Это всегда приводит к наличию переходного режима, более или менее значительного в зависимости от достигнутой к концу запуска скорости и от мощности двигателя. Чтобы огргшичить этот переходный режим, можно: - либо использовать реле, контролирующее скольжение посредством измерения частоты роторного тока, проходящего через сопротивление запуска. Оно управляет питанием сети возбуждения в момент, когда скольжение минимально. Это приспособление практически необходимо, когда синхронный мотор дает значительную часть общей мощности. - либо в два приема, автоматически или вручную, подавать ток возбуждения. Различные процедуры возбуждения таковы: - динамо на конце вала двигателя; - отдельный возбудитель, реализованный конверторной фуппои; - статическое возбуждение, реализованное: диодами, связанными с насыщаемыми сопротивлениями с ручной или автоматической регулировкой, • тиристорами с ручной или автоматической регулировкой, • вращающимися диодами, которые питаются обратным альтернатором с ручной или автоматической регулировкой. Техника поворачивается к возбуждению тиристорами или вращающимися диодами. Последний вариант исключает щетки, ликвидирует корпус возбудителя и, к тому же, включает часто в себя устройство синхронизации и пересцепления в случае потери синхронизма. Такие двигатели способны дать реактивную энергию посредством увеличения тока возбуждения. Их применение часто мотивируется этой особенностью, позволяющей компенсировать реактивные нафузки сети. Линии на приведенной фигуре показывают изменение статорного тока в зависимости от тока возбуждения при постоянной нагрузке (кривые Морди). В случае малых мощностей двигатели такого типа применяются довольно редко. Напротив, для более, чем 2000 кВ, они употребляются часто из-за своей хорошей эффективности и высокого коэффициента мощности. Для плавных движений употребление синхронного двигателя напрашивается само собой: однако, приводимые в движение двигателем машины должны иметь относительно слабую пару сопротивления при 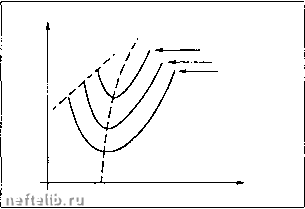 Кривые Морди запуске, а хрупкость амортизации ограничивает ритм запуска. 1.6.4.2.3. Асинхронные синхронизованные двигатели. В этом типе двигателей для запуска используются приспособления аналогичные случаю синхронных моторов. Следовательно, ротор должен быть смешанным и должен содержать: - обмотку роторного запуска, - обмотку возбуждения. Это приспособление позволяет двигателю запускать машины с высокой парой сопротивления. С другой стороны, солидная асинхронная пара двигателя позволяет ему, при некоторых условиях на схему, перезацеплять при потере синхронизма. К сожалению, указанные преимущества компенсируются довольно высоким наведенным роторным напряжением, а также относительно сложной, дорогой и громоздкой аппаратурой запуска. Применение таких моторов ограничивается случаем, когда требуются одновременно повышенная пара запуска и очень хорошей коэффициент мощности. Современная тенденция состоит в предпочтении такому мотору синхронного или асинхронного двигателя, приспособленного к условиям эксплуатации. 1.6.5. ЭЛЕКТРОННЫЕ РЕШЕНИЯ ПРОБЛЕМЫ РЕГУЛИРУЕМОГО ПРИВОДА Существуют многочисленные решения проблемы: далее кратко излагаются наиболее распространенные. 1.6.5.1. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ПИТАНИЕМ ЧЕРЕЗ УПРАВЛЯЕМЫЙ ТИРИСТОРНЫЙ ВЫПРЯМИТЕЛЬ На сегодня это наиболее распространенное решение в промышленности. Технология совершенствуется и привод подобного типа остается конкурентоспособным, поскольку отсутствуют специальные ограничения по мощности, скорости или тому подобное; дигюазон мощностей варьируется от киловатта по меньшей мере до десятка мегаватт. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [ 21 ] 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 |
|||||||||||||||||||||||||||
 |
 |
