
|
|
|
|
Главная Переработка нефти и газа - возникновение дополнительного взаимодействия между изогнутой частью колонны штанг и ограничивающими ее насосно-ком-прессорными трубами при ходе штанг вниз, а также между изогнутой частью колонны НКТ и штангами при ходе штанг вверх; - возникновение в течение насосного цикла изменений в ходе плунжера. Ниже рассмотрим только изгиб штанг, т.к. изгиб колонны НКТ достаточно полно изложен в технической литературе. При определенных допущениях: - колонна штанг рассматривается как однородный стержень постоянного диаметра; - длина изогнутого участка равна длине сжатого участка штанг; - изогнутый участок имеет форму винтовой спирали постоянного закручивания с переменным шагом, увеличивающимся в направлении от плунжера вверх (рис. 9.9); 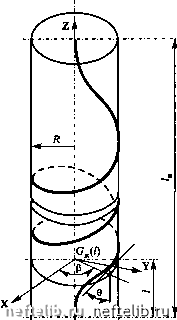 Рис. 9.9. Схематизация изогнутого участка колонны штанг задача расчета характеристик продольного изгиба сводится к задаче о статической устойчивости однородного вертикального стержня значительной длины и гибкости с закрепленным нижним концом (колонна штанг с плунжером), расположенного внутри кругового цилиндра (колонна НКТ). Решение данной задачи базируется на системе дифференциальных уравнений равновесия (уравнений Кирхгофа). Ранее доказано, что принцип независимости действия сил для решения задач статики тонких стержней может быть использован в случае, когда величины осевой деформации в сотни раз меньше длины деформируемого стержня, что может быть принято для рассматриваемого нами случая (длина колонны штанг в сотни и более раз больше длины деформируемого участка). Рассматривается следующая схема, моделирующая изогнутый участок штанговой колонны: цилиндрический стержень (колонна штанг) сжат силой и помещен в ограничивающий (вмещающий) цилиндр (колонна НКТ); трение отсутствует. Для указанной схемы, пренебрегая влиянием условий защемления концов стержня (экспериментальные данные показывают, что условия заделки концов стержня не влияют на характер образующейся винтовой спирали уже па сравнительно небольшом расстоянии от места заделки) и рассматривая равновесие элемента длины деформированного стержня dl относительно осей подвижного естественного трехгранника, можно записать систему уравнений равновесия в скалярной форме: dF dl dF dl dF + sF,-xF,=-f„ , (9.157) dM. dl dl dM, dl -аеМ„=0 , где F, М - соответственно внутренние сила и момент, действующие в поперечных сечениях стержня; /- реакция ограничивающего цилиндра, приходящаяся на единицу длины стержня; п, b,t - оси подвижного естественного трехгранника, соответственно: главная нормаль, бинормаль и касательная; ае, X - соответственно кривизна и кручение пространственной линии (проекции угловой скорости вращения естественного трехгранника на бинормаль и касательную; проекция угловой скорости вращения естественного трехгранника на главную нормаль равна нулю); F, F F;/„, Д,/,; М,, М,, М, - соответственно проекции соответствующих усилий {F и/) и моментов (М) на оси естественного трехгранника. Если пренебречь влиянием на изгиб кручения и сжатия и для малых углов наклона 0, можно записать следующую зависимость, которая и будет положена в основу дальнейщего рассмотрения: si„>e = %, (9.159) где 0 - угол, образованный вертикалью и касательной к упругой оси деформированного стержня в точке, находящейся на расстоянии / от плунжера (рис. 9.9); G(/) - сжимающая сила, действующая в данном сечении колонны Gl) = G-qJ; (9.160) G - осевая сжимающая сила, действующая на колонну щтанг у плунжера; 9шт ж - единицы длины щтанг в жидкости (продукции скважины); R - радиус винтовой спирали, форму которой принимает изогнутый участок колонны щтанг; Е - модуль Юнга материала щтанг; / - экваториальный момент инерции поперечного сечения исследуемого стержня. Величины RuJ вычисляются по следующим зависимостям: R=zZA (9.161) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 [ 208 ] 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 |
||
 |
 |
