
|
|
|
|
Главная Переработка нефти и газа Опыт эксплуатации двигателей в наклонно направленном и горизонтальном бурении выявил недостаточную стойкость гибких валов при углах перекоса секций более 1°30. В связи с этим в последних конструкциях двигатели типа ДГ стали оснащать шарнирно-торсионными соединениями. ХАРАКТЕРИСТИКИ ВЗД Характеристики необходимы для выбора оптимальных параметров режима бурения и поддержания их в процессе долбления, а также для определения путей дальнейшего совершенствования конструкций ВЗД и технологии бурения с их использованием. В последнее время внимание к характеристикам ВЗД все более повышается. Это связано с внедрением регулируемых приводов буровых насосов, для эффективного использования которых знание характеристик гидромашины становится непременным условием; распространением новых технологий (наклонно направленное и горизонтальное бурение, бурение с использованием непрерывных труб), особенно чувствительных к изменению режимов работы ВЗД. В общем случае различают статические и динамические характеристики ВЗД. Статические характеристики отражают зависимости между переменными гидродвигателя в установившихся режимах. Эти характеристики можно условно классифицировать как стендовые и нагрузочные. Стендовые характеристики (как функции от крутящего момента) определяют в лаборатории (рис. 20.19). Динамические характеристики определяют соответствующие зависимости в неустановившихся режимах и обусловливаются инерционностью происходящих процессов. К динамическим относят и пусковые характеристики гидродвигателя. 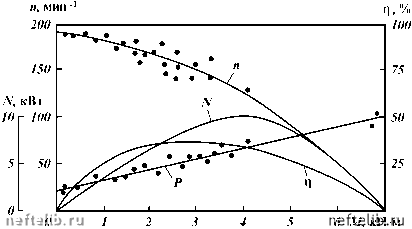 Рис. 20.19. Типичная стендовая характеристика ВЗД (ДГ-155) ВЛИЯИИЕ РАСХОДА ЖИДКОСТИ ИА ХАРАКТЕРИСТИКИ ВЗД Расход жидкости Q является одним из параметров режима бурения. Чаще всего возможный диапазон изменения Q определяется технологией бурения скважины, и его задают конструктору ВЗД вместе с другими исходными данными. Стендовые испытания ВЗД разных типоразмеров показывают, что с увеличением расхода повышаются как тормозной момент и перепад давления, так и мощность, крутящий момент, частота вращения и перепад давления в экстремальном режиме. КПД гидродвигателя при увеличении Q в допустимом диапазоне изменяется незначительно. Нижний предел расхода жидкости ограничивается нагрузочной способностью или устойчивостью работы двигателя. Верхний предел допустимого расхода жидкости определяют три фактора: высокие инерционные нагрузки при увеличении частоты вращения; КПД двигателя п: при заданном натяге после достижения определенного значения расхода жидкости происходит снижение объемного п. Это объясняется тем, что с увеличением частоты вращения и перепада давления по линии контакта образуется односторонний зазор, приводящий к разгерметизации РО и росту утечек. Кроме того, с увеличением расхода растут и гидравлические потери в двигателе; износ РО вследствие повышенных контактных напряжений и скоростей скольжения в рабочей паре, а также скорости жидкости в каналах РО. Если ограничения по расходу не удовлетворяют требованиям гидравлической программы бурения, используют способ разделения потока жидкости через полый ротор двигателя с помощью регулятора расхода. 20.4. ТУРБОВИИТОВЫЕ ЗАБОЙИЫЕ ДВИГАТЕЛИ В последние годы отечественный парк забойных гидравлических двигателей пополнился новым представителем - турбовинтовым двигателем (ТВД). Впервые схема турбовинтового агрегата была предложена в 1970 г. авторским коллективом ВНИИБТ в составе М.Т. Гусмана, Д.Ф. Балденко, А.М. Кочнева и С.С. Никомарова. ТВД органично сочетают высокую стойкость, свойственную турбобурам, и оптимальную энергетическую характеристику (высокий уровень отношения M/n при незначительном падении частоты вращения при нагрузке двигателя), характерную для ВЗД. Турбовинтовой двигатель можно отнести к редукторным турбобурам, в котором винтовая пара выполняет функции не только редуктора, но и стабилизирующего элемента при перегрузках долота. Несмотря на большую металлоемкость и сложность конструкции, эти двигатели в ряде случаев успешно конкурируют с ВЗД, прежде всего вследствие их существенно большего ресурса, что особенно привлекательно при использовании современных высокопроизводительных долот. Двигательные секции ТВД конструктивно выполняют в двух вариантах: с винтовой парой, монтируемой над турбинной секцией или между турбинной и шпиндельной секциями. В первом варианте упрощается конструкция двигателя - проектируют лишь один узел соединения планетарного ротора. Второй вариант менее предпочтителен, так как требует двух узлов соединения ротора. 20.5. ЭЛЕКТРОБУРЫ Наряду с гидравлическими в бурении используют и электрические машины - электробуры. Электробур - это электрическая забойная машина, своеобразный электродвигатель, смонтированный в трубном корпусе малого диаметра и предназначенный для привода долота на забое скважины. Современный электробур представляет собой, как правило, асинхронный маслонаполненный двигатель с короткозамкнутым ротором. Конструкция промышленного электробура была разработана в СССР в 1937-1940 гг. группой инженеров (А.П. Островский, Н.В. Александров, Ф.Н. Фоменко, А.Л. Ильский, Н.Г. Григорян и др.). Последующие опытно-конструкторские работы позволили значительно модернизировать электробур по сравнению с первыми образцами: была создана безредукторная машина, мощность на валу электробура была увеличена в 2-3 раза (от 70 до 120-230 кВт) и наряду с этим уменьшен наружный диаметр. Серийное производство электробуров в СССР было налажено с 1956 г. В настоящее время в ряде районов страны этим способом ежегодно бурят 200 - 250 тыс. м пород. Хотя указанный объем многократно уступает объему турбинного бурения в нашей стране, принципиальная схема подачи электрической энергии к забою скважины и использование погружного электрического двигателя для привода долота имеют неоспоримые преимущества. Однако конструктивные трудности, невысокие эксплуатационно-технические показатели и большая стоимость машины на данном этапе пока сдерживают применение этого вида техники в бурении. Размерный ряд электробуров предусматривает их выпуск с наружными диаметрами корпуса 164, 170, 185, 215, 240, 250 и 290 мм. Более распространен электробур диаметром 170 мм. В обозначении электробура первое число - его наружный диаметр, второе - число полюсов обмотки статора (например, Э215-10). Могут добавляться буквы «М», обозначающая модернизированную модель, и «Р» - для редукторных электробуров. Обозначение электродвигателя содержит сведения о наружном диаметре корпуса, общей длине магнитопровода с длиной немагнитопроводных пакетов и о числе полюсов. Например, маркировка МАП1-17-658/6 расшифровывается следующим образом: МАП - мотор асинхронный погружной; 1 - для электробура; 17 - наружный диаметр корпуса в см; 658 - общая длина магнитопровода и немагнитных пакетов статора в см; 6 - число полюсов. Выпускаемый промышленностью электробур включает трехфазный асинхронный маслонаполненный двигатель А и маслонаполненный шпиндель Б на подшипниках качения (рис. 20.20). В трубном корпусе электробура размещены пакеты магнитопроводной стали статора б; они разделены пакетами немагнитопроводной стали в местах расположения радиальных шариковых опор ротора. Пакеты ротора 7 с алюминиевой обмоткой насажены на полом валу 5 двигателя. Ротор расположен в статоре с зазором 0,5 - 0,6 мм на сторону. Полость двигателя за- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 [ 247 ] 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 |
||
 |
 |
